
자율 주행 및 장애물 감지를 위한 5 m/360° 레이저 스캐너 기술
문희곤
hgmoon@gist.ac.kr
062-715-3077
기술개요
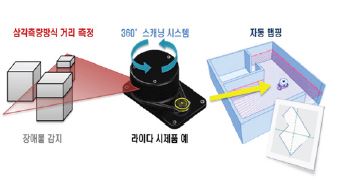
- 360°전방향 항법용 맵 획득 및 장애물 회피를 위한 레이저 스캐너
- 삼각측량방식을 이용한 5 m 급 레이저 거리 센서와 360°측정이 가능한 스캐너로 구성
- 무인 운송 차량(AGV)의 자율주행, 장애물 회피 등을 위한 항법용 센서로 사용
기술의 특징/우수성
- 삼각측량 방식을 이용해 비행시간측정 방식의 상용 제품에 비교해 수십 배 낮은 원가와 소형화된 구조로 제작 가능
- 360°스캐너를 적용함으로써 센서 하나로 전방향 측정 가능
- 라이다 센서 모듈 단일 제품으로 구성이 가능해 자율주행 및 장애물 감지를 위한 산업용과 연구용 라이다 센서는 물론 취미용으로도 다양한 분야에서 바로 적용 가능

주요기능/사양
- 측정 거리 : 6cm ~ 5m
- 거리 분해능 : <10mm @ 3m , 20mm @ 5m
- 스캐닝 영역 : 360°
- 스캐닝 속도 : 10 Hz

응용분야
- UI-센서, 헬스케어 소자
- 스티커 형태의 디스플레이 (OLED)
- 플렉시블 TFT 기반 전자소자
