
야외용 로봇을 위한 위치 및 방위각 추정 장치
문희곤
hgmoon@gist.ac.kr
062-715-3077
기술개요
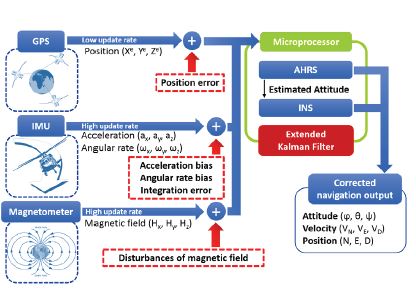
- 저가형 가속도 센서/지자계 센서/GPS를 이용한 모바일 로봇을 위한 실외 위치 인식 시스템
- 측정 잡음을 각 측정 정보들간의 상보적인 성질을 이용하는 알고리즘을 통해 효과적으로 제거
기술의 특징/우수성
- 저가형 센서를 이용한 구성을 통해 낮은 비용으로 높은 성능 구현 가능
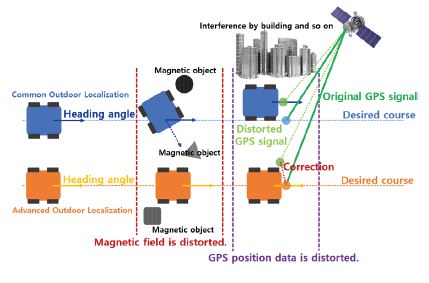
- 지자계가 외란된 환경에서도 모바일로봇의 올바른 방향각을 추정 가능
- GPS의 위치 정보가 좋지 못한 전파 음역지역에서도 모바일 로봇의 위치 추정 가능
주요기능/사양
- 저가형 가속도 센서, 지자계 센서, GPS로 구성된 임베디드 시스템
- 제한된 조건에서 방위각 오차 ±2°, 위치 오차 2m CEP, 항법 정보 갱신 속도 50Hz
- 지자계가 외란된 환경에서도 정상적인 방위각 추정, 최대 방위각 오차 ±10° 이내
응용분야
- 군사적 목적을 위한 응용, 상업적 목적을 위한 응용, 재난 구조 및 보안 목적을 위한 응용
